Step-by-Step
Range of Motion
Introduction
The "Range of Motion" (more commonly stated as R.O.M. or ROM) stage connects the markers, the template skeleton, and the actual subject being capture together. In this sense we are using the markers and a skeleton template in order to adjust towards the subject's skeleton - this aids the capture of data and provides us with an actual kinematic model. Without the R.O.M. our output would be marker positions (which can still be imported into other applications, but is far from the prefered step)
Capture the R.O.M.
The second stage in the ROM is to actually capture the position of the markers over a period whereby the subject goes through a series of exercises that covers their own normal "Range Of Motion". The following video shows the approximate sequence and motions that should be followed - the general idea is to move each joint through its natural range of motion
Note: The subject should always start and finish each capture in the T-Pose (especially with the R.O.M.); the T-Pose doesn't need to follow directly into the sequence, or follow directly out, but it should be performed. The T-Pose is essentially with the arms outstretched, and the legs slightly apart.
The T-Pose is useful to provide a clearly defined start and finished point, it is in the same pose as a character (to which we might map later), and it provides the cameras with a clear view of each marker at the start of a trajectory (we cannot map a trajectory backwards).
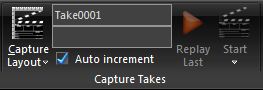
- Select the Studio Activies tab
- Select the Capture Layout button - this will present all the windows associated with capture
- Click Start in order to start the capture
Tip: Try to be smooth and solid in your motions, and do not take too long - there is no need to repeat as long as each step is done properly.
Make sure you keep your arms outstretched, as much as possible, when you are performing other motion that do not involve them; while this is unnatural, it permits the system to see the markers clearly - which is very important as capturing the R.O.M. should be as clean as possible.
If you are doing extreme motions, such as gymnastics or acrobatics, try and increase your R.O.M. to match the type of your planned motions that will be captured.
If the R.O.M. was not good when we review the capture, first determine why (go back over the settings if markers are not showing up etc) and then perform the R.O.M. again.
Initiating the Template
Once we have the capture we want to use for the R.O.M. we can load it into the processing section
- Under Data Management tab find the capture of the R.O.M., double click on the blue-circle with the blue cross through it (this will load it for processing and switch off the cameras)
- Select the Studio Activities tab
- Click the button: Define New Actor
- Find the Vicon Skeleton Template (*.vst) called ViconFullBodyTraining_Blade.vst (which can be found D:\TemplatesDefault) and press open
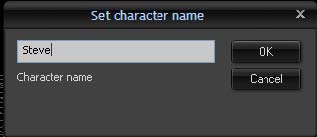
- Provide a name under Character Name and press OK

Reconstruction
The reconstruction process takes the 2D data frame-by-frame and processes it through triangulation; this should take the data and produce 3D positions for each marker over the length of the capture.
- Select the Studio Activities tab
- Under the Go Live section, select the view drop-down and set to "None"
- Click Process ROM down arrow
- Select the Reconstruct ROM and the 3D points should be reconstructed (taking approximately 10secs to process)
Warning: make sure during the reconstruction phase you see "Reconstructing frame XXXX (45 reconstructions)" most of the time, the important part is the 45; this corresponds to the number of markers in the template. It should be 45 most (not all) of the time, if it is more or less, then something is wrong and the number of markers and marker placement should be checked

Labelling
Once we have the markers in 3D, they still do not relate to the template, therefore by labelling each marker as it corresponds to the template we are creating a match - this is only done for the ROM because once we have the subject's skeleton recorded then have this correspondance
- Position the Time Slider so that all the markers are visible
- Click Process ROM down arrow [Under Studio Activities Tab]
- Select the T-Pose Label and the markers should be labelled
Tip: It is important to label all markers in a single frame (early in the sequence, as this will be the start frame), this doesn't necessarily have to be the first frame, but the actor should still be in the T-Pose. If you are more than approximately 200 frames into a sequence, and you do not have all 45 markers in a single frame, then you need to check your markers and redo the range of motion (checking the suit and markers for correct placement, removing ruffles, etc).
Warning: when trying to perform the Process ROM it respond by saying "No Active Take to Reconstruct", this is usually because there is no capture loaded. In this case you need to make sure you double-clicked on the blue-circle with cross through it
Trace Trajectories
We have now labelled the first frame with all the markers present; however in order to determine the full R.O.M. we need to have all the frames in the sequence labelled. In order to do this we need to perform an "Autolabel ROM" based on the first fully labelled frame.
- Click Process ROM down arrow [Under Studio Activities Tab]
- Select the Auto Label ROM and the markers should be labelled for all frames, where possible
Calibrate Subject
Once all the frames have labelled markers, we need to calibrate the subject according to the ROM to produce a skeleton (VSK - Vicon SKeleton) file that can be used for the remaining captures

- Click Calibrate Character [Under Studio Activities Tab]
Note: This process will take between 2 and 3 minutes depending on the subject's proportions and the cleaness of the ROM. Once the subject's skeleton has been created, it is stored in a file under the name created at the beginning. The file is usually exported back to the capture ready for processing and can be seen under the Character Management window.
